人の反射神経を持つロボットHERMES、MITが開発。マスタースレーブで感覚を同期
映画「パシフィック・リム」はパイロットたちの動きに合わせて、巨大な兵器ロボット「イェーガー」が動きまわり、敵の怪獣と戦う作品でした。
イェーガー乗りのようなマスター・スレーブ式の外骨格コントローラにより、人間のバランス感覚や反射までを取り入れて動くヒューマノイドロボット HERMES をマサチューセッツ工科大学(MIT)の研究者が開発しました。
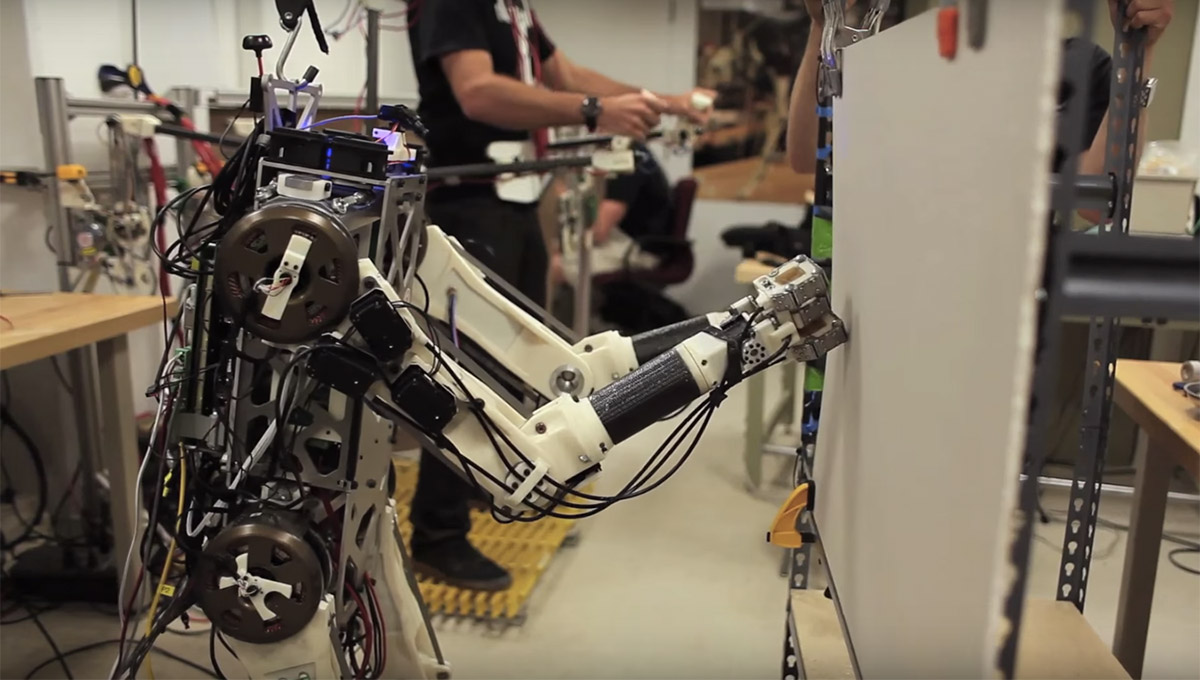
MITの博士課程大学院生のジョアン・ラモス氏らが開発したヒューマノイドロボットの名は「ヘルメス」(HERMES)。
ロボットを操作する人がセンサーなどからなる装置を上半身に装着して、腕や手、指先を動かすと、ヘルメスも人の動きに同期して同じように動きます。いわゆるマスター・スレーブ方式ですが、ヘルメスのセンサーが受ける抵抗やバランスを操縦者の外骨格型コントローラにフィードバックすることで、人間のバランス感覚や反射神経を持ったロボットとして機能する点が特徴です。その様子について、ジョアン・ラモス氏は「人間の脳をロボットの中に入れようとするもの」と表現します。
ヘルメスの頭にはカメラが備え付けられていて、操作する人は離れていてもその映像を見ながら操作することで、あたかも自分がヘルメスになったように思いのままに動かすことができます。まだ上半身しか操作できませんが、ヘルメスの両手にはそれぞれ3本指があり、操作者の動きに合わせて、ものを掴んだり缶を潰したりするだけでなく、コーヒーをコップに注ぐこともできます。
ヘルメスを開発したもう一人の研究者である博士課程大学院生のアルバート・ワン氏によれば「将来は人間のような知能と自律制御もヘルメスに搭載する予定」。
このように、センサーを着けた人の動きに合わせてロボットを操作する遠隔操作技術は、日本の研究者が「テレイグジスタンス」と名付けこれまでも研究されてきました。慶應義塾大学が開発したテレイグジスタンスロボット「テレサ」では、操作者はヘッドマウントディスプレイをつけることで、あたかも自分がロボットになったかのようにしてロボットを操作することができます。
テレイグジスタンスロボットが特に期待されているのは、人が近づくのが難しい過酷な現場での作業です。例えば、6月にカリフォルニアで開催された人型ロボットコンテスト DARPA Robotics Challenge の決戦では人と同じように作業ができる災害救助ロボットがその動きを競いましたが、自動車を運転したりバルブを締めたりといった細やかな動きをするには、ロボットの遠隔操作技術が課題でした。
ヘルメスやテレサのように、遠隔操作で人と同じ動きをするロボットならば、原発事故の現場でも事故復旧の作業ができるようになるかもしれません。ただし、ヘルメスもテレサもまだ下半身は自在に動かせません。災害現場での活用はもう少し時間がかかりそうです。
論文は